直角坐标机器人创新实验平台(含机器视觉创新实验)
一、产品概述
直角坐标机器人也称桁架机器人或龙门式机器人,作为一种成本相对较低、系统结构简单的自动化机器人系统解决方案,在点胶、码垛、分拣、搬运、上下料等常见的工业生产领域有广泛应用。直角坐标机器人采用运动控制系统实现驱动及编程控制,是经典的机器人运动学、机器人运动控制实验设备。
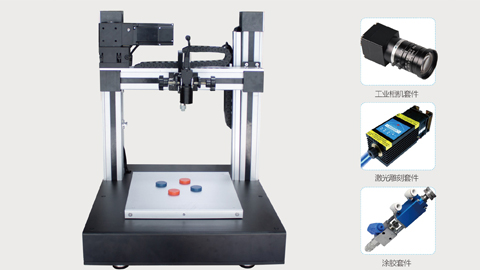
直角坐标机器人创新实验平台是以X、Y、Z直角坐标系统为基本数学模型,以伺服电机为驱动的单轴机械臂为基本工作单元,以伺服控制器、滚珠丝杆、同步皮带等组件架构起来的三维运动模组,可以完成在X、Y、Z三维坐标系中任意一点的到达和遵循可控的运动轨迹。产品配套实验软件支持单轴各种运动模式(S曲线、T曲线、速度模式);以及两轴平面插补实验和三轴空间插补实验;软件提供丰富的可视化图形界面,包括运动数据的实时观测,实时显示运行轨迹曲线。
结合工业应用场景,设备配套工业视觉像机,完成机器视觉、图像处理相关实验,完成工件分拣、自动锁紧螺丝、3D打印等多种创新拓展应用。
二、产品特点
1.实验平台包含运动控制、机器视觉、图像处理实验,涵盖知识点多,内涵丰富;
2.对标机器人工程相关专业,是验证机器人运动学、机器人运动控制的经典实验设备;
3.伺服控制器和伺服交流电机配置、精度高、稳定可靠,可完成高精度定位实验;
4.提供与实物平台模型一致的仿真软件,基于数字孪生技术,与实物平台实时联动;
5.提供丰富的可视化界面,运行数据实时监测、运行曲线实时显示;
6.开放提供图像识别、图像定位等拓展实验算法,方便学生算法验证和创新;
7.动控制器支持多轴运动控制指令,包含数控G代码编译动态库平台,支持数控代码编程;
8.实验平台结合工业相机,完成机器视觉相关实验,完成自动锁螺丝、 3D打印等创新应用;
9.实验平台支持二次开发,控制器预留接口,设备工装夹具等方便拆卸替换,方便用户完成不同场景的创新应用;
三、实验项目
运动控制实验部分
1. 空间定位实验
2. 伺服器参数整定实验
3. S曲线、T曲线运动模式实验
4. PID控制实验
5. 电流环速度环位置环控制实验
6. 平面直线插补实验
7. 平面圆弧插补实验
8. 空间直线插补实验
9. 空间圆弧插补实验
10. 数控代码编程实验实验
机器视觉实验部分
1. 基于颜色的静态工件分拣实验
2. 基于形状的静态工件分拣实验
3. 基于颜色的动态工件分拣实验
4. 基于形状的动态工件分拣实验
图像处理实验部分
1. 图像点运算实验(灰度变换)、
2. 图像变换实验(Radon/Hough/傅里叶)、
3. 图像几何变换实验(平移/镜像/旋转/插值)、
4. 形态学图像处理实验、
5. 空间域图像增强实验(图像平滑、中值滤波、图像锐化)、
6. 频率域图像增强实验(快速傅里叶变换、小波变换)、
7. 边缘检测实验、霍夫变换实验(直线、曲线、任意形状检测)、
8. 阈值分割实验、
9. 区域分割实验。
10. 车牌识别实验(实时拍照识别)、
11. 人脸识别实验(实时拍照识别)、
12. 海参分级检测实验(实时拍照识别)、
13. 轴承综合测量实验(实时拍照识别)、
14. 工件颜色识别实验(实时拍照识别)、
15. 电路板印刷瑕疵检测实验(图像识别)、
16. 答题卡识别实验(图像识别)
四、软件界面





©2021 睿景时代(大连)科技有限公司 辽ICP备2021003980号-1 技术支持 - 资海科技集团